Experimental
Uncertainty
Xiaoping Du
Department of Mechanical and
Aerospace Engineering
Missouri University of
Science and Technology
February
8, 2014
1.
Introduction
Experiments require taking measurements of
physical quantities, such as velocity, time, and voltage. We generally assume
that the “true” values of the quantities to be measured exist if we had a
perfect measuring apparatus and followed a perfect procedure. The measurements,
however, are always subject to unavoidable uncertainty due to the limitations
of the measuring apparatus, random environment, and even fluctuations in the
value of the quantity being measured.
As uncertainty is an unavoidable part of the
measurement process, we should at first identify its sources and effects, and
then quantify and report it. We should also seek to reduce measurement
uncertainty whenever possible.
The result of any measurement has two
components as shown in the following expression for a measured temperature.
![]()
The first term on the right-hand side is a numerical value that gives the
best estimate of the quantity measured, and the second term indicates the degree of uncertainty associated
with the estimated value. This result tells that the temperature measured is
most likely to be 20°C, but it could be between 19°C and 21°C. In this chapter we study how to get the expression as the one
in Eq. (1) for a quantity measured.
The other task of this chapter is uncertainty
propagation. If the measured quality, for example, the temperature T in Eq. (1), is used as an input
variable for an analysis, the analysis result for the output variable ![]() will also be
naturally reported in the same form as Eq. (1), having the best estimate of
will also be
naturally reported in the same form as Eq. (1), having the best estimate of ![]() and the associated
uncertainty term. The second term is the result of the uncertainty in T propagated to
and the associated
uncertainty term. The second term is the result of the uncertainty in T propagated to ![]() . The task of uncertainty propagation is to find both of the
two terms of
. The task of uncertainty propagation is to find both of the
two terms of ![]() .
.
2.
Experimental
Errors
In
this section, we discuss experimental errors and their types.
2.1 Experimental errors
Experimental error is the difference between
the true value of the parameter being measured and the measured value. The
error of a measurement is never exact because the true value is never exactly
known. Measurement errors could be either positive or negative.
A measurement error can be assessed by its
accuracy and precision.
Accuracy measures how close a measured value is
to the true value. As discussed above, the true value may never be exactly
known, and it is difficult or even impossible to determine the accuracy of a
measurement.
Precision measures how closely two or more
repeated measurements agree with each other. Good repeatability means higher
precision.
The distinction between accuracy and
precision is illustrated in Fig.1.
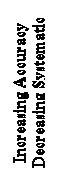
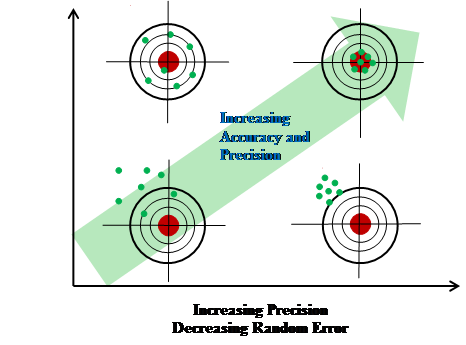
Fig.
1
Accuracy and Precision
Generally speaking, the accuracy and
precision can be increased by decreasing the systematic and random errors,
respectively. These two errors constitute the experimental error. Next we
discuss the two types of error.
2.2 Systematic
errors
Systematic errors are those that affect the
accuracy of a measurement. Systematic errors are not determined by chance but
are introduced by an inaccuracy inherent in a measuring instrument or measuring
process. In other words, systematic errors may occur because of something wrong
with the instrument or its data handling system or because of the wrong use of
the instrument. In the absence of other types of errors, systematic errors
yield results systematically in repeated measurements, either greater than or
less than the true value. In this sense, systematic errors are “one-sided”
errors.
For example, you use a cloth tape measure to
measure the length of a table. The tape measure has been stretched out from a
number years of use. As a result, your length measurements will always be
shorter than the actual length.
If a systematic error is known to be present
in the measurement, you should either to correct it or report it in your
uncertainty statement. It is, however, hard to detect or reduce systematic
errors. Below are some general guidelines.
・
Calibrate the measuring instrument if
the systematic error comes from poor calibration.
・
Compare experimental results from your
instrument with those from a more accurate instrument so that you have a good
idea about how large systematic error of your instrument is.
・
Change the environment, which interferes
with the measurement process, so that the accuracy of the measuring instrument
is highest.
2.3 Random experimental errors
Random errors are errors affecting the precision
of a measurement. Random errors can be easily detected by different
observations from repeated measurements. Random errors are commonly form
unpredictable variations in the experimental conditions under which the
experiment is performed. For example, random errors can come from electric
fluctuations within components used in a measuring instrument or variations in
temperature change in a lengthy experiment.
In the absence of other types of errors,
repeated measurements yield results fluctuating above and below the true value
or the average of the measurements. This indicates that random errors are
“two-sided” errors.
3.
Experimental
Uncertainty Quantification
As shown in the expression ![]() in Eq. (1), when reporting the experimental result, we have
the best estimate term (
in Eq. (1), when reporting the experimental result, we have
the best estimate term (![]() ) and the uncertainty term (
) and the uncertainty term (![]() ). In this section, we focus on using statistical techniques
to find both of the terms.
). In this section, we focus on using statistical techniques
to find both of the terms.
Uncertainty herein is a quantification of the
double about the measurement result. Uncertainty quantification provides us
with an estimate of the limits to which we can expect an error to go as shown
in Eq. (1).
Suppose a quantity to be measured is X, and its measurements are![]() ,
,![]() ,…,
,…, ![]() , where N is the
number of repeated measurements.
, where N is the
number of repeated measurements.
With the N
measurements, the obvious question we may ask is: “What is the best estimate of
X?” If the only error source is from random
fluctuations, given that the random error is a “two-sided” error, a nature
answer is to use the average of the measurements. Averaging the measurements
makes the fluctuations on both sides cancelled out to some degree.
The average or mean is calculated by
![]()
After obtaining the best estimate term, we
now look at the uncertainty term. The uncertainty in the set of the measurements![]() ,
,![]() ,…,
,…, ![]() can be quantified
by the degree of scatter of the measurements around the mean.
can be quantified
by the degree of scatter of the measurements around the mean.
The most commonly used measure of scatter is
the sample standard deviation ![]() defined by
defined by

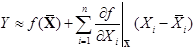
Example
1 A
slider mechanism is show in Fig. 2. The motion input, which is the angular
velocity ![]() of link AB, is measured. The ten measurements are
given by
of link AB, is measured. The ten measurements are
given by ![]() rad/s. Determine
the average and standard deviation of the measurements.
rad/s. Determine
the average and standard deviation of the measurements.
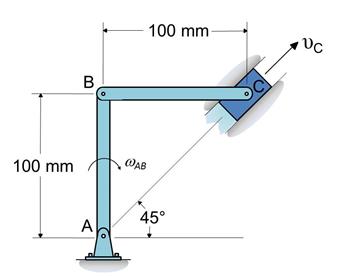
Fig.
2
Slider Mechanism
The average is given by

The average is considered the best
estimate the angular velocity.
The standard deviation is computed by

Note
that the number of significant digits used in the final result of the average
(3.99 rad/s) is the same as the number of significant digits in the
measurements. It does not make sense to use the calculated one (3.994 rad/s)
because its last digit is beyond the precision of the measuring instrument.
After
we have done the statistical analysis, we could state that the best estimate of
![]() is 3.99 rad/s. Of
course, there is some degree of uncertainty because of the non-zero standard
deviation. We should also report the associated uncertainty at a certainty confidence
level. This requires us to know something about probability distributions. Next
we discuss some basics about the normal distribution, which is the most
commonly used distribution.
is 3.99 rad/s. Of
course, there is some degree of uncertainty because of the non-zero standard
deviation. We should also report the associated uncertainty at a certainty confidence
level. This requires us to know something about probability distributions. Next
we discuss some basics about the normal distribution, which is the most
commonly used distribution.
A
normal distribution for random variable ![]() is determined by
the mean and standard deviation of
is determined by
the mean and standard deviation of ![]() and is denoted by
and is denoted by
![]() .
.
The
probability density function (PDF) of ![]() , as shown in Fig. 3, tells us everything about
, as shown in Fig. 3, tells us everything about ![]() , especially the likelihood of the occurrence of certain
possible values of
, especially the likelihood of the occurrence of certain
possible values of ![]() . It is easy to see that the values around the mean
. It is easy to see that the values around the mean ![]() have the highest
chance to occur. Fig. 3 also indicates that the range defined by
have the highest
chance to occur. Fig. 3 also indicates that the range defined by ![]() covers about 95%
possible values of
covers about 95%
possible values of ![]() . In other words, the probability that the actual values of
. In other words, the probability that the actual values of ![]() fall into the
interval
fall into the
interval ![]() is about 95%.
is about 95%.
If
we report our experimental result in the form of ![]() , we expect that the true value that was measured has a 95%
chance to reside in
, we expect that the true value that was measured has a 95%
chance to reside in ![]() . We can then define the uncertainty term as
. We can then define the uncertainty term as
![]()
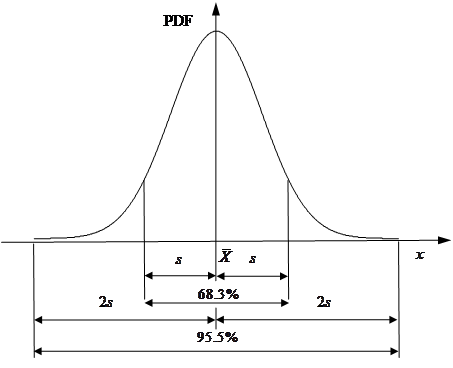
Fig. 3. PDF of a normal random variable
Example
2 The
angular velocity ![]() of link AB of the mechanism shown in Fig. 2 is
measured, and the ten measurements are given in Example 1. Report the
measurement result in a standard form.
of link AB of the mechanism shown in Fig. 2 is
measured, and the ten measurements are given in Example 1. Report the
measurement result in a standard form.
In Example
1, we have obtained the average ![]() and the standard
deviation
and the standard
deviation ![]() . The uncertainty term is then
. The uncertainty term is then
![]()
Using the same number of significant figures as ![]() , we have
, we have
![]()
The measurement result is then
stated as
![]()
With
the result, we expect that the chance of the true angular velocity ![]() being within
being within ![]() is 95%.
is 95%.
4.
Combined
Uncertainty
In
the last example, uncertain comes from only one source. If uncertainty is from multiple
independent sources, we should combine their effects by using the following
equations.
Assume
that random variables ![]() and
and ![]() are independent
and that their standard deviation are
are independent
and that their standard deviation are ![]() and
and ![]() , respectively. The standard deviation of
, respectively. The standard deviation of ![]() is then given by
is then given by
![]()
Then
the combined uncertainty term is
![]()
Let
the uncertainty terms associated with ![]() and
and ![]() be
be ![]() and
and ![]() , respectively. The combined uncertainty term can then be
rewritten as
, respectively. The combined uncertainty term can then be
rewritten as
![]()
or
![]()
We can
generalize the result to a general case with ![]()

Example 3 The angular
velocity ![]() of link AB of the mechanism shown in Fig. 2 is
measured, and the ten measurements are given in Example 1. The measuring
equipment manufacturer claims an accuracy of
of link AB of the mechanism shown in Fig. 2 is
measured, and the ten measurements are given in Example 1. The measuring
equipment manufacturer claims an accuracy of ![]() on the equipment
readout. This accuracy is assumed at 95% confidence. Estimate the overall measurement
uncertainty and report the measurement result in the standard notation.
on the equipment
readout. This accuracy is assumed at 95% confidence. Estimate the overall measurement
uncertainty and report the measurement result in the standard notation.
There
are two sources of uncertainty. We have found the uncertainty term from random fluctuations
![]() in Example 2. The
other source of error is from the measuring instrument itself with
in Example 2. The
other source of error is from the measuring instrument itself with ![]() . According to Eq. (11), the combined overall uncertainty
term is
. According to Eq. (11), the combined overall uncertainty
term is
![]()
Then the measurement result is stated
as
![]()
5.
Uncertainty Propagation
Measured
quantities may be used for an analysis. Let the measured quantities be ![]() and the output of
the analysis be
and the output of
the analysis be ![]() . Also assume
. Also assume ![]() . From experiments, we have
. From experiments, we have ![]() .
.
Uncertainties
in ![]() will be propagated
to
will be propagated
to ![]() through
through ![]() . Our task is to find
. Our task is to find ![]() .
.
We
start pour discussions from a linear function.
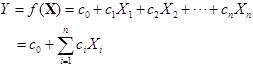
where ![]() is constant.
is constant.
If ![]() are independent,
we have
are independent,
we have
![]()
where ![]() is the
average of
is the
average of ![]() .
.
The standard
deviation of ![]() is
is
![]()
where ![]() is the standard
deviation of
is the standard
deviation of ![]() , and
, and ![]() .
.
Since
![]() , we obtain
, we obtain
![]()
We
now look at the general case where ![]() is a nonlinear
function. To use the results we have obtained for a linear function, we
linearize
is a nonlinear
function. To use the results we have obtained for a linear function, we
linearize ![]() at the means of
at the means of ![]() ,
, ![]() as
as
where ![]() and
and ![]() are all constant.
We then have
are all constant.
We then have
![]()
and
![]()
where  .
.
The
uncertainty term for ![]() is the same
as given in eq. (15).
is the same
as given in eq. (15).
Example
4 The
angular velocity ![]() of link AB of the mechanism shown in Fig. 2 (The
figure is redrawn in Fig.4 for convenience) is measured, and ten measurements
are given in Example 1. The measuring equipment manufacturer claims an accuracy
of
of link AB of the mechanism shown in Fig. 2 (The
figure is redrawn in Fig.4 for convenience) is measured, and ten measurements
are given in Example 1. The measuring equipment manufacturer claims an accuracy
of ![]() on the equipment
readout. This accuracy is assumed at 95% confidence. The measured value of the
length of link AB is
on the equipment
readout. This accuracy is assumed at 95% confidence. The measured value of the
length of link AB is ![]() . Determine the velocity of the slider
. Determine the velocity of the slider ![]() , and state the result in the standard notation.
, and state the result in the standard notation.
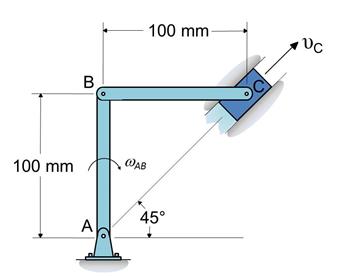
Fig.
4
Slider Mechanism
Let ![]() and
and ![]() . Then
. Then ![]() and
and ![]() . The
result was obtained from Example 3.
. The
result was obtained from Example 3. ![]() and
and ![]() .
.
We
now perform kinematics analysis to find ![]() . The function
for
. The function
for ![]() is given by
is given by
![]()
![]()
![]()
![]()
![]()
The
velocity of the slider is then reported as
![]()
6.
Conclusions
The
measurement error is the difference between the quantity being measured and its
true value. The measurement error consists of systematic error and random
error. The measurement error can be characterized by uncertainty analysis, and
the measurement results is commonly stated in the form of ![]() , where
, where ![]() is the best
estimate (usually the average of repeated measurements), and
is the best
estimate (usually the average of repeated measurements), and ![]() is the
uncertainty term with a stated confidence level (usually 95%).
is the
uncertainty term with a stated confidence level (usually 95%).
When
a measured quantity is used in an analysis, the effect of the uncertainty in
the measurement quantity on the analysis result can be quantified through
uncertainty propagation, which is often based on the first order Taylor
expansion.