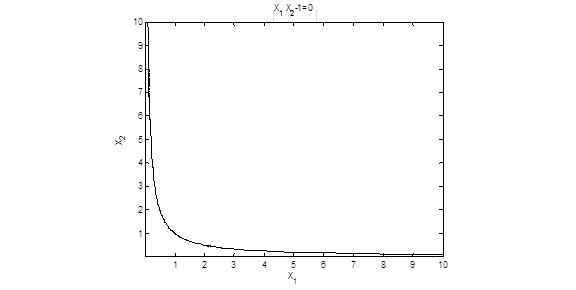
3. A limit-state
function is given by ![]() , where
, where ![]() and
and ![]() . If
. If ![]() and
and ![]() are independent, use FORM to find the
probability of failure.
are independent, use FORM to find the
probability of failure.
Solution
![]()

![]()
![]()
![]()
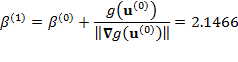
(2) MPP Search
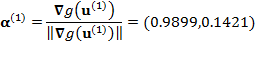
1st iteration: ![]()

![]()
![]()
![]()
![]()
![]()

2nd iteration: ![]()
![]()
![]()
![]()
3 rd iteration: ![]()
![]()
![]()
![]()
We repeat the process until convergence. The detailed search history is shown in the following table.
Table 1 Convergence History
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0.0 |
0.0 |
24.0 |
10.0 |
5.0 |
11.1803 |
0.8944 |
0.4472 |
0.0 |
|
1 |
-1.920 |
-0.960 |
3.6866 |
8.080 |
1.160 |
8.1628 |
0.9899 |
0.1421 |
2.1466 |
|
2 |
-2.5720 |
-0.3692 |
-1.6656 |
9.2615 |
-0.1437 |
9.2627 |
0.9999 |
-0.0155 |
2.5982 |
|
3 |
-2.4181 |
0.0375 |
-0.1751 |
10.0751 |
0.1637 |
10.0764 |
0.9999 |
0.0163 |
2.4184 |
|
4 |
-2.4007 |
-0.0390 |
-0.0150 |
9.9220 |
0.1986 |
9.9239 |
0.9998 |
0.020 |
2.4010 |
|
5 |
-2.3991 |
-0.0480 |
-0.0002 |
9.9040 |
0.2019 |
9.9060 |
0.9998 |
0.0204 |
2.3995 |
|
6 |
-2.3990 |
-0.0489 |
0.0 |
9.9022 |
0.2020 |
9.9042 |
0.9998 |
0.0204 |
2.3995 |
(3) Estimate ![]()
![]()